
Soit un repère $\mathcal{R}$ d'origine un point $O$ fixe et de base cartésienne $\mathcal{B}=(\overrightarrow{x}, \overrightarrow{y}, \overrightarrow{z})$. Soit un point $M$ de l'espace, alors le vecteur $\overrightarrow{OM}$ est appelé vecteur position du point $M$ dans ce repère $\mathcal{R}$. Suivant la base de vecteurs adoptée (elle n'est pas toujours cartésienne), ce vecteur peut s'écrire de plusieurs manières.
En base cartésienne
La base est centrée sur le point $O$ qui est fixe, le vecteur $\overrightarrow{OM}$ s'exprime dans la base cartésienne de cette manière:
\begin{equation*}
\overrightarrow{OM} = x\overrightarrow{x} + y\overrightarrow{y} + z\overrightarrow{z}
\end{equation*}
La figure ci-dessous montre la position du point $M$ dans la base cartésienne:
En base cylindrique
La base est centrée sur le point $M$ mobile, le vecteur $\overrightarrow{OM}$ s'exprime dans la base cylindrique de cette manière:
\begin{equation*}
\overrightarrow{OM} = r\overrightarrow{u_{r}} + z\overrightarrow{z}
\end{equation*}
La figure ci-dessous montre la position du point $M$ dans la base cylindrique: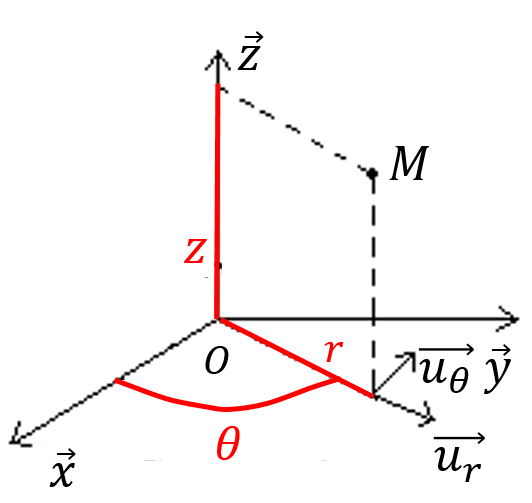
En base cylindrique les vecteurs $\overrightarrow{u_{r}}$ et $\overrightarrow{u_{\theta}}$ sont facilement exprimables en fonction de la base fixe:
\begin{equation*}
\overrightarrow{u_{r}} = \cos(\theta)\overrightarrow{x} + \sin(\theta)\overrightarrow{y} ~\text{et}~ \overrightarrow{u_{\theta}} = -\sin(\theta)\overrightarrow{x} + \cos(\theta)\overrightarrow{y}
\end{equation*}
Il est donc facile de dériver ces vecteurs par rapport au temps dans la base fixe.
En base sphérique
La base est centrée sur le point $M$ mobile, le vecteur $\overrightarrow{OM}$ s'exprime dans la base sphérique de cette manière:
\begin{equation*}
\overrightarrow{OM} = r\overrightarrow{u_{r}}
\end{equation*}
La figure ci-dessous montre la position du point $M$ dans la base cylindrique:
Remarque : Pour obtenir le vecteur vitesse, il suffit de dériver par rapport au temps le vecteur position par rapport à la base fixe $\mathcal{B}=(\overrightarrow{x}, \overrightarrow{y}, \overrightarrow{z})$.
