
Le vecteur vitesse :
Construction d'un vecteur vitesse
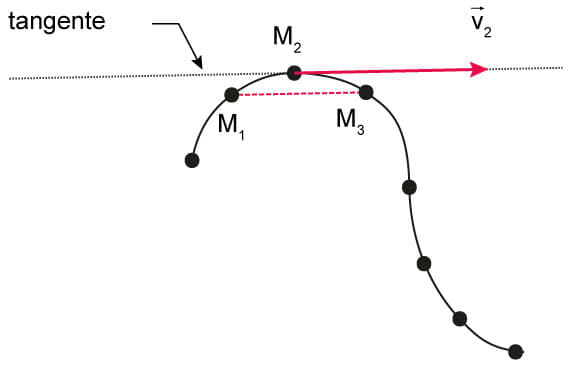
Le vecteur vitesse moyen $\rm \overrightarrow{v}(t_2)$ au point $\rm M_2$ à la date $\rm t_2$ s'écrit :
$\boxed{\rm \overrightarrow{v}(t_2)=\dfrac{\overrightarrow{M_1 M_3}}{t_3-t_1}}$
Le vecteur vitesse $\rm \overrightarrow{v}(t_2)$ possède :
- une direction : la tangente à la trajectoire au point $\rm M _2$, parallèle a la droite $\rm (M _1 M _3)$
- un sens : celui du mouvement
- une valeur : $\rm v_2=\dfrac{M M_2}{t_3-t_1}=\dfrac{M_1 M_3}{2 \tau}$. $\rm v_2$ s'exprime en $\rm m.s^{-1}$.
$(\tau$ : intervalle de temps constant entre deux points consécutifs) - une longueur : donnée par une échelle des vitesses (exemple: $\rm 1~cm \leftrightarrow 0,1~m.s^{-1}$)
Le vecteur variation de vitesse :
Comment construire le vecteur $\bf \Delta \overrightarrow {V_5} = \overrightarrow {V_6} - \overrightarrow {V_4}$ ?
- Tracer les vecteurs vitesse $\rm \overrightarrow {V_4}$ et $\rm \overrightarrow {V_6}$
- Au point $\rm M_5$, reconstruire le vecteur $\rm \overrightarrow {V_6}$
- Construire le vecteur $-\rm \overrightarrow {V_4}$ depuis l'extrémité du vecteur $\rm \overrightarrow {V_6}$ reconstruit juste avant.
- Le vecteur $\Delta \rm \overrightarrow {V_5}$ est le vecteur qui joint l'origine de $\rm \overrightarrow {V_6}$, point $\rm M_5$, à l'extrémité de $- \rm \overrightarrow {V_4}$

Principe fondmental de la dynamique
$\rm \displaystyle \sum \vec F_{ext} = m \times \Delta \overrightarrow v / \Delta t$

Le rôle de la masse du système :
Plus la masse du système est grande, plus la variation du vecteur vitesse est faible pour une même somme des forces appliquées.



