Soient trois vecteurs dont on veut faire la somme et le produit scalaire des deux premiers :
$\overrightarrow{\rm AB}=\left(\begin{array}{cc}a_x\\ a_y\\ a_z\end{array}\right)$ ; $\overrightarrow{\rm BC}=\left(\begin{array}{cc}b_x\\ b_y\\ b_z\end{array}\right)$ ; $\overrightarrow{\rm CD}=\left(\begin{array}{cc}c_x\\ c_y\\ c_z\end{array}\right)$ $\Rightarrow$ $\overrightarrow{\rm AD}=\left(\begin{array}{cc}a_x+b_x+c_x\\
a_y+b_y+c_y \\ a_z+b_z+c_z\end{array}\right)$ et $\overrightarrow{\rm AB}\cdot \overrightarrow{\rm BC} = \rm AB\times BC\times \cos(\overrightarrow{\rm AB}~; \overrightarrow{\rm BC})$ $=(a_x b_x+a_yb_y+a_zb_z)$
Dans un plan $xoy$ :
$\overrightarrow{\rm AB}=\left(\begin{array}{cc}a_x\\
a_y\end{array}\right)$ ; $\overrightarrow{\rm BC}=\left(\begin{array}{cc}b_x\\
b_y\end{array}\right)$ ; $\overrightarrow{\rm CD}=\left(\begin{array}{cc}c_x\\
c_y\end{array}\right)$ $\Rightarrow$ $\overrightarrow{\rm AD}=\left(\begin{array}{cc}a_x+b_x+c_x\\a_y+b_y+c_y\end{array}\right)$
L’unité d’une force est le Newton ou ses multiples.
L’unité de la masse d’un solide est le $\rm kg$ ou ses multiples.
Dans un environnement gravitaire, une masse $\rm (kg)$ génère un poids $\rm (N)$ par la relation :
$\mathrm F=m\times \gamma$.
Sur la terre, la valeur moyenne de l’accélération de la pesanteur est :
$\gamma = g= 9,81~\rm m/s^2$.
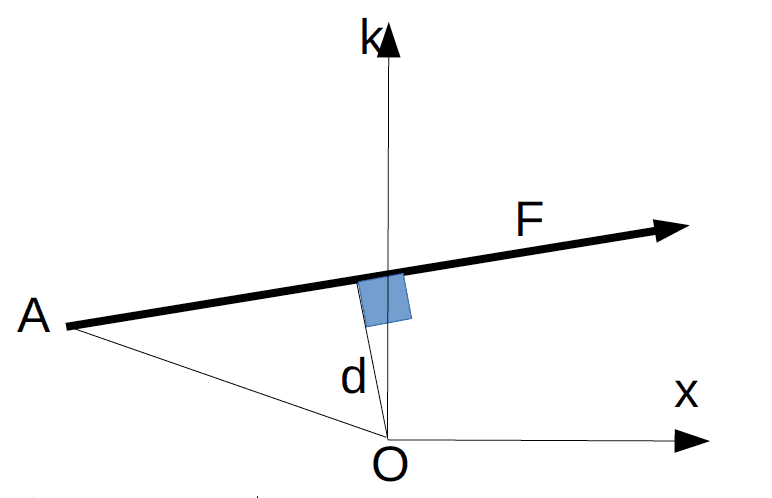
Application du produit vectoriel, moment d’une force en un point :
$\overrightarrow{\rm M_oF}
=\overrightarrow{\rm OA} \wedge \overrightarrow{\rm F}$ $=\| \overrightarrow{\rm OA}\|\times \|\overrightarrow{\rm F}\|\times \sin (\overrightarrow{\rm OA}~; \overrightarrow{\rm F})$ $= \left(\begin{array}{cc}a_x\\
a_y\end{array}\right)\wedge \left(\begin{array}{cc}\mathrm F_x~;
\mathrm F_y\end{array}\right)$ $=(a_x \mathrm F_y−a_y\mathrm F_x)\vec k$
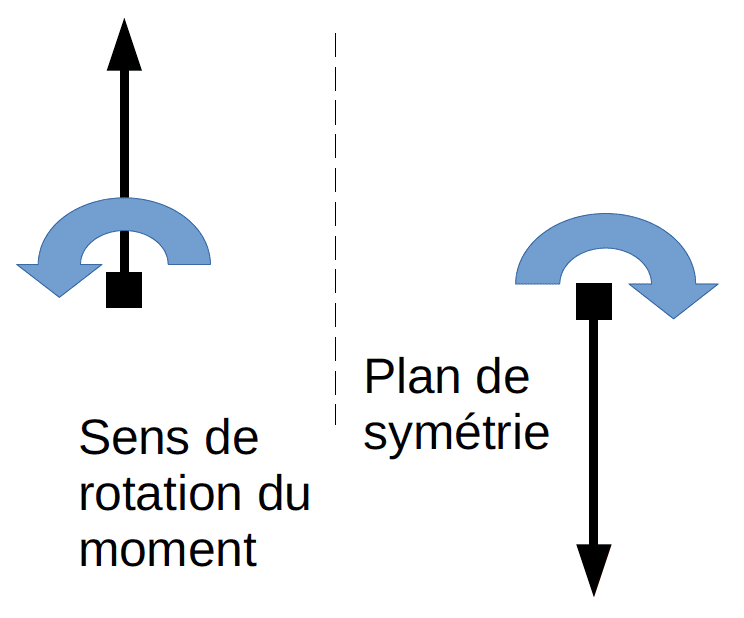
Le symbole $\wedge$ se dit « vectoriel » et définit le produit vectoriel. Le vecteur issu d’un produit vectoriel ne respecte pas les lois de symétrie et donc devient un « pseudo-vecteur » (antisymétrique).
Moment d’une force par le calcul géométrique : $\overrightarrow{\rm M_oF}
=−d\times \| \overrightarrow{\rm F}\| \vec k$ et en appliquant la règle du « tire-bouchon » (ici négatif).
(**) Exemple numérique $\rm \overrightarrow{F}=−500~kN$ sur $y$ ; $d=3,00~\rm m$ sur $x \Rightarrow$ $\rm M_{/o}\overrightarrow{F} =−1~500~m.kN$ sur $z$.
Produit vectoriel dans un système $\rm 3D$ :
$\overrightarrow{\rm AB}=\left(\begin{array}{cc}a_x\\
a_y\\
a_z\end{array}\right)$ ; $\overrightarrow{\rm BC}=\left(\begin{array}{cc}b_x\\ b_y\\ b_z\end{array}\right)$ ; $\Rightarrow$ $\overrightarrow{\rm AB}\wedge \overrightarrow{BC}=\left(\begin{array}{cc}a_x\\a_y\\a_z\end{array}\right)\wedge\left(\begin{array}{cc}b_x\\b_y\\b_z\end{array}\right)$ $=\left(\begin{array}{cc}a_y b_z−b_y a_z\\a_z b_x−b_z a_x\\a_x b_y−b_x a_y\end{array}\right)$
Les indices $(x,y,z)$ ne doivent pas apparaître dans la ligne repérée. Par exemple, la première ligne (axe $x$) n’a pas d’indice $x$.
La première ligne $(x)$ est obtenue en faisant les différences des produits croisés des lignes $(y)$ et $(z)$.
Torseur de force et torseur cinématique : ils sont composés d’une résultante et d’un moment résultant. L’écriture symbolique est :
$\rm T_A=\left[\begin{array}{cc}\overrightarrow{\rm R}\left(\begin{array}{cc}\rm X\\\rm Y\\\rm Z\end{array}\right)\\ \rm \overrightarrow{M_A}\left(\begin{array}{cc}\rm L\\\rm M\\\rm N\end{array}\right)\end{array}\right]$ pour le torseur statique écrit au point $\rm A$ $(\rm R = force$ et $\rm M$ un moment résultant).
$\rm C_A=\left[\begin{array}{cc}
\overrightarrow{\rm \omega}\left(\begin{array}{cc} \omega_x\\
\omega_y\\ \omega_z
\end{array}\right)\\\overrightarrow{\rm V_A}\left(\begin{array}{cc}v_x\\v_y\\v_z\end{array}\right)\end{array}\right]$ pour le torseur cinématique écrit au point $\rm A$ $(\rm V = vitesse$ et $\omega = \text{vitesse de rotation})$
Formules de transfert des moments dans un torseur statique et cinématique :
$\overset{\rightharpoonup}{\rm M_A} = \overset{\rightharpoonup}{\rm M_B} + \overset{\rightharpoonup}{\rm AB} \wedge \overset{\rightharpoonup}{\rm R}$
$\overset{\rightharpoonup}{\rm V_A} = \overset{\rightharpoonup}{\rm V_B} + \overset{\rightharpoonup}{\rm AB} \wedge \overset{\rightharpoonup}{\omega}$