Pour la travée $\rm n° i$, nous aurons :
$\displaystyle a=\int^{\rm L_i}_{0}\left(1 - \dfrac{x}{\rm L_i}\right)^2\dfrac{dx}{\mathrm{EI}_{(i,x)}}$ ; $\displaystyle b=\int^{\rm L_i}_{0}\dfrac{x}{\rm L_i}\times \left(1-\dfrac{x}{\rm L_i}\right)\dfrac{x}{\mathrm{EI}_{(i,x)}}$ ; $\displaystyle c=\int^{\rm L_i}_0\left(\dfrac{x}{\rm L_i}\right)^2\dfrac{dx}{\mathrm{EI}_{(i,x)}}$
Si $\rm I_i(x) = constante = I_i$ $\Rightarrow a = 2b = c = \dfrac{\rm L_i}{3 \rm EI_i}$
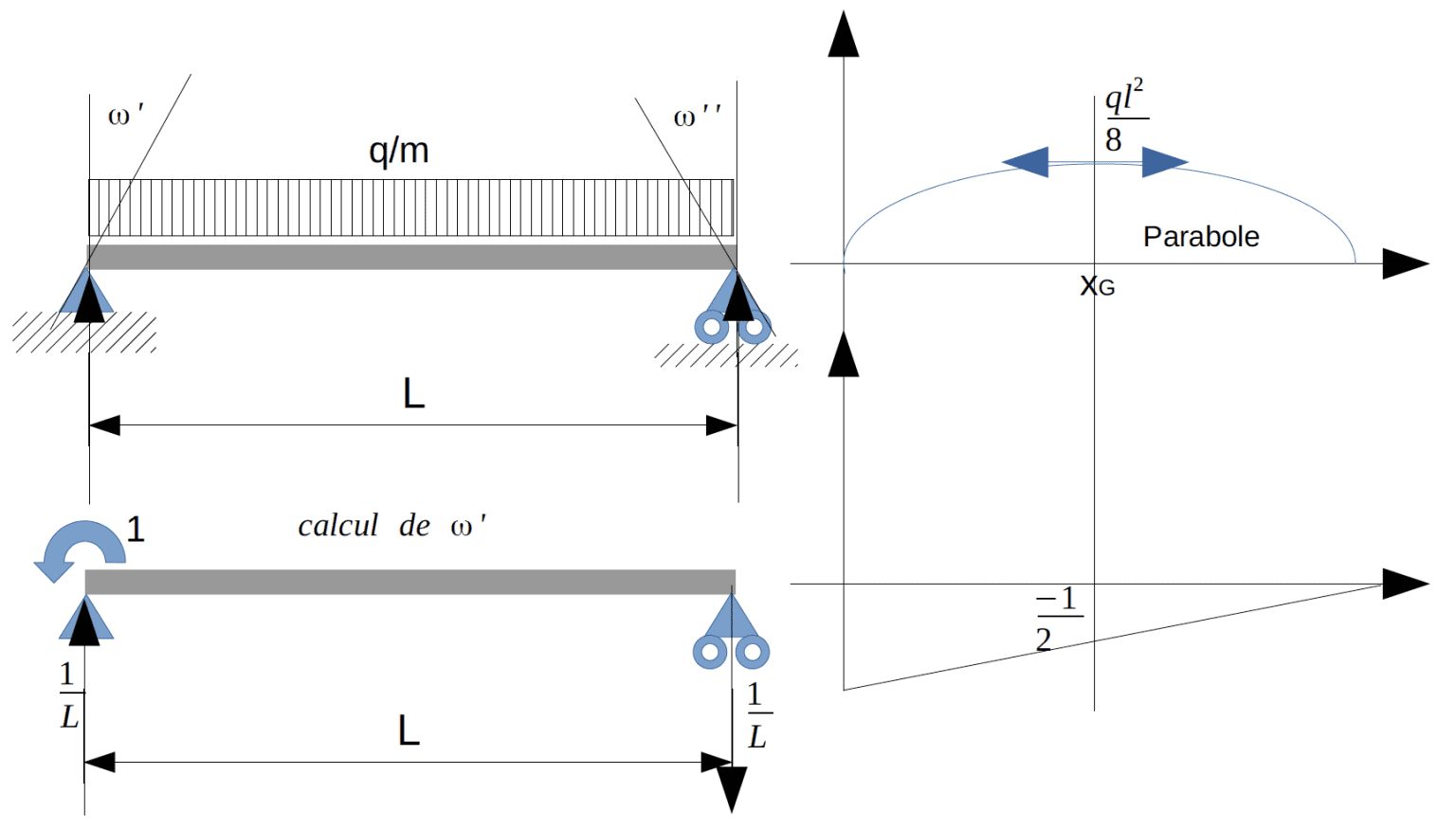
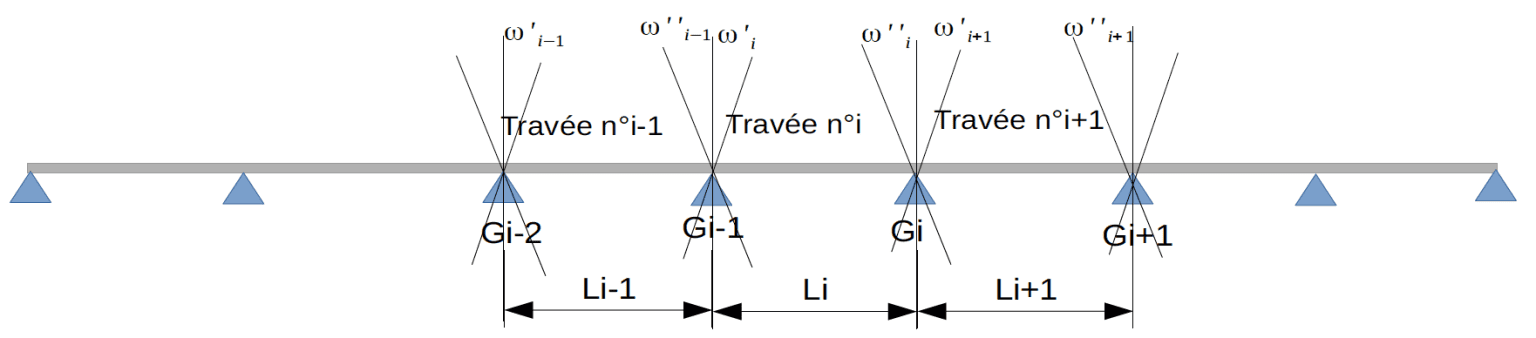
$\displaystyle \omega'_i=−\int^{\rm L_i}_0\left(1 - \dfrac{x}{\rm L_i}\right) \dfrac{\mu_{(x)}}{\mathrm{EI}_{(i,x)}}dx$ ; $\displaystyle\omega''_i=\int^{\rm L_i}_0\left(\dfrac{x}{\rm L_i}\right)\dfrac{\mu_{(x)}}{\mathrm{EI}_{(i, x)}}dx$ les rotations aux appuis.
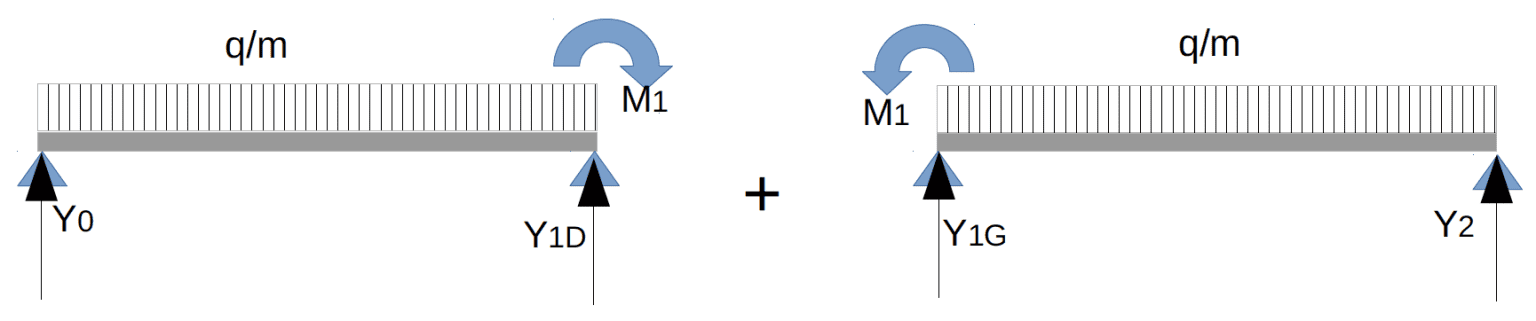
$\mu$ les moments fléchissants de chaque travée isostatique si déplacements $d_i$ et $d_{i−1}$ des appuis :
$\Omega_i=
\dfrac{d_i−d_{i−1}}{\rm L_i}$
Formule des trois moments pour l’appui $\mathrm n°i$ :
$b_i \mathrm{M_{i−1}} + (a_{i+1} + c_i)\mathrm{M_i} + b_{i+1}\mathrm{M_{i +1}}$ $\rm =\omega'_{i + 1}−\omega''_i + \Omega_{i+1}−\Omega_i$
La plupart du temps, il n’y a pas de déplacement au niveau des appuis, donc les $\Omega$ sont nuls.
$\Rightarrow b_i \mathrm{M_{i−1}} +(a_i+1+c_i)\mathrm{M_i}+b_{i+1}\mathrm{M_{i+1}}$ $=\omega'_{ i+1}−\omega''_i$
Lorsque $\rm E$ et $\rm I$ sont constants, alors la formule des trois moments devient :
$\rm M_{i−1} \rm L_i+ 2 (L_i+L_{i+1})M_i+L_{i+1}M_{i+1}$ $=6\rm EI (\omega'_{i+1}−\omega''_i)$
C’est cette expression qui sera la plus couramment employée.
Efforts internes à partir de la formule des trois moments. Pour la travée $\rm n°i$ et de longueur $\rm L_i$ :
$\rm M_i−1 L_i+2 (L_i+L_{i+1})M_i+L_{i+1}M_{i+1}$ $=6\mathrm{EI}(\omega'_{i+1}−\omega''_i)$
$\rm V_{i(\mathcal x)}=V_{iso(\mathcal x)} +\left(\dfrac{M_{i−1}−M_i}{L_i}\right)$ ; $\rm M_{i(\mathcal x)} = M_{iso(\mathcal x)} + M_{i−1} \left(1−\dfrac{\mathcal x}{L_i}\right)+M_i\dfrac{\mathcal x}{L_i}$
avec :
- $\rm V_{iso(\mathcal x)}$ est l’effort tranchant de la travée $\rm n°i$ rendue isostatique.
- $\rm M_{iso(\mathcal x)}$ est le moment fléchissant de la travée $\rm n° i$ isostatique.
- $\rm M_{i(\mathcal x)}$ est le moment fléchissant de la travée $\rm n°i$ dans son contexte réel.
- $\rm V_{i(\mathcal x)}$ est l’effort tranchant de la travée $\rm n° i$ dans son contexte réel.