Base orthonormée directe :
Une base orthonormée est une base constituée de vecteurs de norme égale à 1 et orthogonaux 2 à 2. Par exemple en 3D la base (→e1,→e2,→e3) est orthonormée si et seulement si ∀(i,j)∈[[1,3]]2, →ei.→ej=δij avec δij=1 si i=j, 0 sinon.
Une base orthonormée (→e1,→e2,→e3) est directe si et seulement si la matrice dont les colonnes sont les vecteurs de la base a un déterminant égal à +1. Autrement dit avec le principe des 3 doigts on doit respecter l’ordre suivant :
- Le pouce →→e1
- L’index →→e2
- Le majeur →→e3
Une base orthonormée directe couramment utilisée en mécanique est la base canonique (→x,→y,→z) avec →x=(1,0,0) ; →y=(0,1,0) ; →z=(0,0,1).
Opérations sur les vecteurs :
Soient 3 vecteurs (→u,→v,→w) de R3, soit λ∈R.
Produit scalaire :
- →u⋅→v=→v⋅→u
- →u⋅(→v+λ→w) =→u⋅→v+λ→u⋅→w
- →u⋅→v=→0 si et seulement si →u et →v sont orthogonaux.
- Si →u=(x,y,z) et →v=(x′,y′,z′) alors →u⋅→v=xx′+yy′+zz′
Produit vectoriel :
- →u∧→v=−→v∧→u
- →u∧(→v+λ→w) =→u∧→v+λ→u∧→w
- →u∧→v=→0 si et seulement si →u et →v sont colinéaires.
Projections :
Soit la figure suivante :
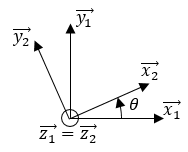
Projeter un vecteur suivant un axe revient à faire le produit scalaire entre ce vecteur et le vecteur directeur de l’axe. Par exemple :
- Projeter le vecteur →x2 suivant l’axe dirigé par →x1 revient à calculer →x2⋅→x1=cos(θ)
- Projeter le vecteur →y1 suivant l’axe dirigé par →x2 revient à calculer →y1⋅→x2=sin(θ).
Torseurs :
Un torseur est une manière d’écrire un champ de vecteurs et peut être décrit par 3 paramètres : 2 vecteurs et un point d’application.
En statique le torseur des actions mécaniques en un point A d’un solide S exercées sur un solide S′ s’écrit :
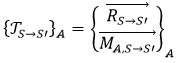
Le torseur respecte la formule de Varignon, en connaissant →MA,S→S′ et le vecteur →BA, on peut connaître →MB,S→S′ : →MB,S→S′ =→MA,S→S′+→BA∧→RS→S′.
La résultante →RS→S′ est inchangée par changement de point.

