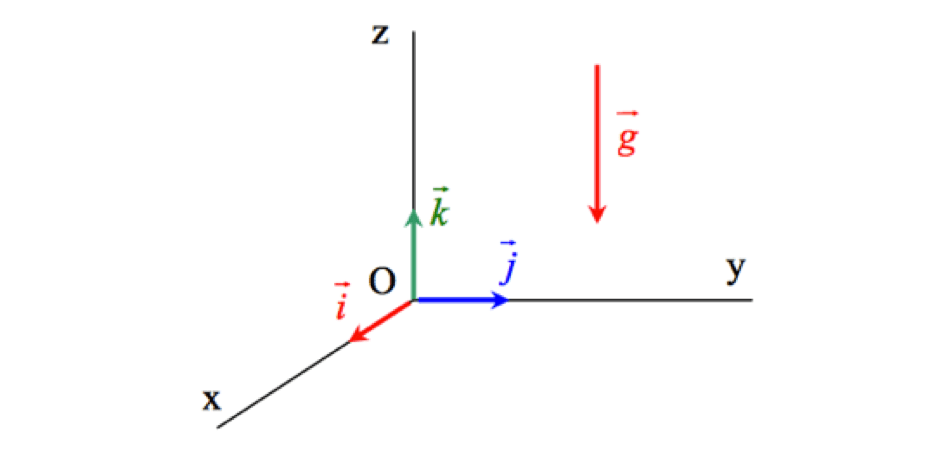
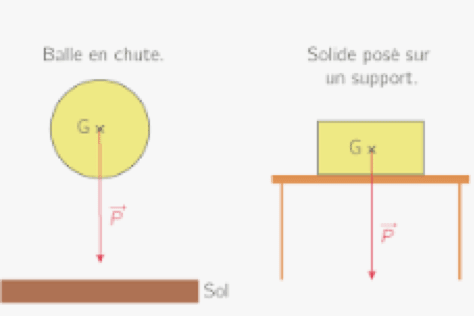
Poids :
Le poids noté P ayant pour caractéristique son point d’application (centre de gravité de l’objet) ; sa direction (verticale) ; son sens (de l’objet vers le centre de la Terre (vers le bas)) et sa norme P=m×g avec P le poids en Newton N, m masse de l’objet en kg et g intensité de la pesanteur en N.kg−1.
Force de gravitation :
FA/B=FB/A =GmAmBd2Avec :
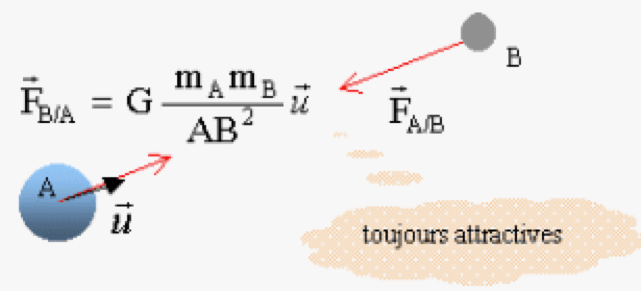
- FA/B et FB/A : force en Newton
- mA et mB : masses des corps A et B en kg
- d : distance entre les deux corps en m
- G : constante gravitationnelle
Force électrostatique :
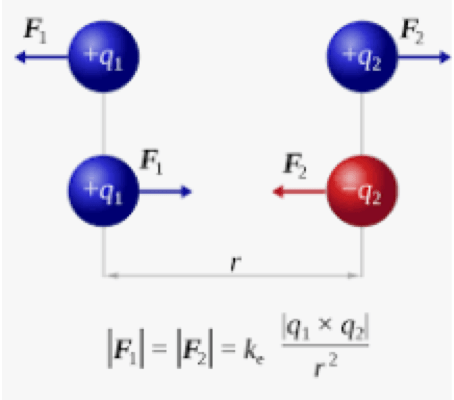
Avec F en Newton (N), k (constante) en N.m2.C−2, q1 et q2 charges en Coulomb(C), d distance entre les corps en m.
Poussée d'Archimède :
Principe d'Archimède : tout corps (lâché sans vitesse initiale), plongé dans un fluide homogène subit une force verticale ascendante →πa exercée au centre de gravité G du corps considéré égale au poids du volume de fluide déplacé :
→πa=−mfluide×→g=−ρ×v×→g
ρ étant la masse volumique du fluide et v le volume de fluide déplacé.
Caractéristiques :
- Origine : centre d'inertie G du système.
- Sens : du bas vers le haut.
- Direction : Verticale passant par G et le centre de la Terre.
- Norme : πa=mfluide×g=ρ×v×g.
πa s'exprime en newton (N) ; mfluide en kg ou ρ en kg.m3 et v en m3 ; g en N.kg−1.