Le référentiel est un endroit de référence par rapport auquel on étudie le mouvement d’un mobile.
À chaque référentiel est associé :
- un repère d’espace pour quantifier la position ;
- un repère de temps (une horloge) pour associer une date à chaque position.
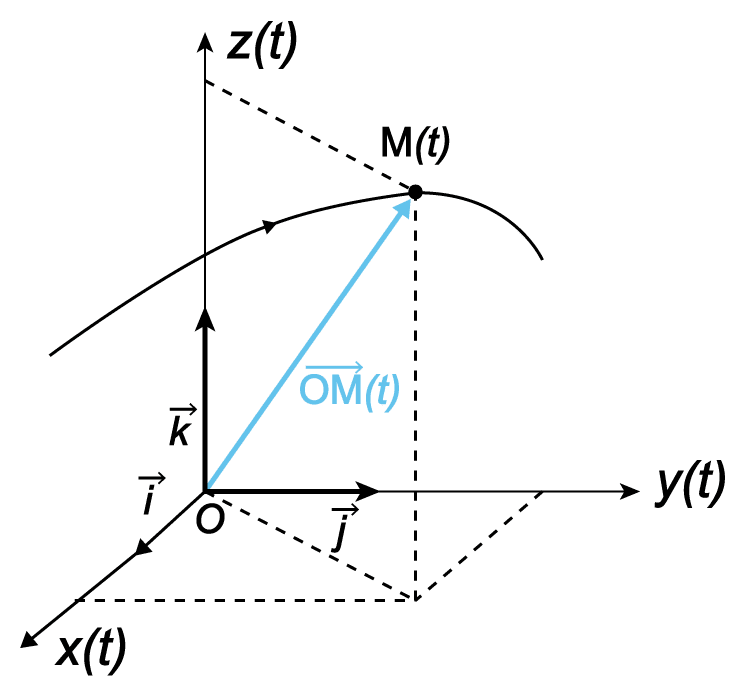
La position d’un mobile M dans un repère (O,→i,→j,→k) est donné par son vecteur-position →OM :
→OM(t)=(x(t)y(t)z(t)) ⇔ →OM(t)=x(t)→i+y(t)→j+z(t)→k
L’ensemble des points, occupé successivement par le mobile M au cours du temps, est appelé trajectoire.
Le vecteur vitesse
Le vecteur vitesse →v(t) caractérise la variation du vecteur position en fonction du temps. Il s'exprime donc comme la dérivée par rapport au temps de son vecteur position.
Le vecteur vitesse instantanée au point M s'écrit donc :
→v(t)=d→OMdt{t en sOM en mv en m.s−1
→v(t)=vx(t)→i+vy(t)→j+vz(t)→k avec →v|vx=dxdtvy=dydtvz=dzdt
Les caractéristiques du vecteur vitesse sont les suivantes :
→v(t){direction : tangent à la trajectoiresens : celui du mouvementvaleur (norme) : ‖
Le vecteur accélération
Le vecteur accélération caractérise la variation du vecteur vitesse en fonction du temps. Il s'exprime donc comme la dérivée par rapport au temps de son vecteur vitesse.
Le vecteur accélération au point s'écrit donc :
avec
Les caractéristiques du vecteur accélération sont les suivantes :
Des exemples de mouvements
Mouvements rectilignes
Vecteur vitesse |
Vecteur accélération |
|
Rectiligne uniforme |
|
|
Rectiligne uniformément varié |
|
|
Repère de Frenet
avec et

Mouvements circulaires
Vecteur vitesse |
Vecteur accélération |
|
Circulaire uniforme |
|
Direction : variable et perpendiculaire à la trajectoireSens : vers le centre de la trajectoireValeur : constante avec |
Circulaire varié |
|
|
Deuxième loi de Newton
Dans un référentiel Galiléen
Rappel : loi de Newton
« Tout corps persévère dans son état de repos ou de mouvement rectiligne uniforme si les forces qui s’exercent sur lui se compensent ».