Les lois de Newton
1re loi de Newton : Principe d’inertie.
Tout corps persévère dans son état de repos ou de mouvement rectiligne uniforme si les forces qui s’exercent sur lui se compensent (l’« état » du corps dépend des conditions initiales).
2e loi de Newton = Principe fondamental de la dynamique
∑→Fext=m→a
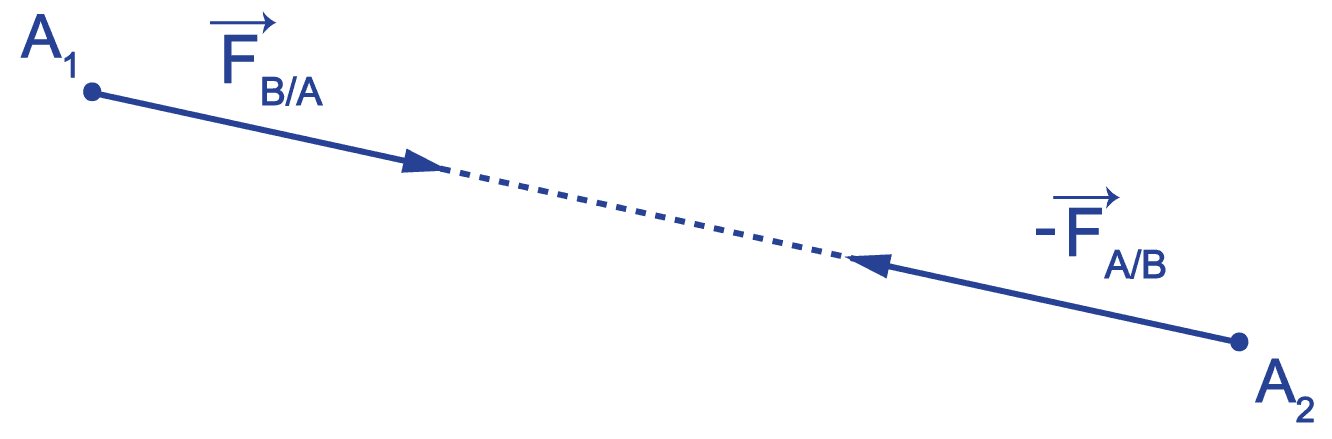
3e loi de Newton : Principe d’action réaction
Si un corps A exerce sur un corps B une force →FA/B, alors B exerce sur A une force →FB/A telle que : →FA/B=→−FB/A.
Que les actions mécaniques entre A et B soient de contact ou à distance, que ces corps soient en mouvement ou immobiles, ces deux forces ont la même direction d'’action : la droite (AB) ; la même intensité (FA/B=FB/A) mais des sens opposés.
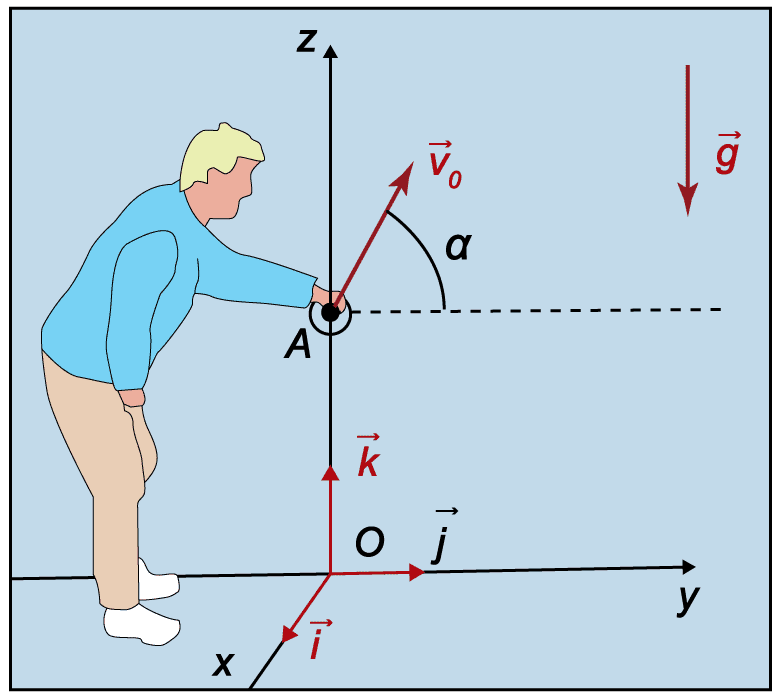
Mouvement dans un champ de pesanteur uniforme
Système : balle de masse m
Référentiel : terrestre supposé galiléen
Bilan des forces : poids de la balle
2e loi de Newton :
- ∑→Fext=m⋅→a(t)
- →P=m⋅→a(t)
- m⋅→g=m⋅→a(t)
- →a(t)=→g=→cte
On projette sur les 3 axes.
Sur Ox--------ax=0--------D'où en primitivant : vx=cste1
|
Sur Oy--------ay=0--------D'où en primitivant : vy=cste2
|
Sur Oz--------az=−g--------D'où en primitivant : vz=−g×t+cste3
|
Grâce à ces deux équations, on peut obtenir l’équation de la trajectoire : (1) Nous donne t=yv0×cosα.
On remplace dans (2) : z(y)=−1/2×g×y2v20×cos2α+tanα×y+OA