Principe fondamental de la dynamique :
$\displaystyle \sum \overrightarrow{\mathrm F} = m\vec a$
Chute libre :
Un solide est en chute libre lorsqu’il n’est soumis qu’à l’action de son poids.
Le système étudié est un solide de masse $m$ et de centre d'inertie $\rm G$.
Le poids $\vec{\mathrm P} = m \vec g$ est la seule force qui s'exerce sur ce système : la deuxième loi de Newton permet d'écrire $\displaystyle \sum \overrightarrow{\rm F_{ext}} = \vec{\rm P} = m\overrightarrow{a_{\rm G}}$ soit $m\vec g = m\overrightarrow{a_{\rm G}}$ et enfin $\overrightarrow{a_{\rm G}} = \vec g$.
Le vecteur accélération du centre d'inertie d'un solide lors d'une chute libre est égal au vecteur champ de pesanteur : la valeur de l'accélération ne dépend pas de la masse du solide.
Dans le référentiel terrestre, on choisit un repère d'espace orthonormal $(\mathrm O~; \vec i, \vec j, \vec k)$ tel que l'axe vertical $(\mathrm O~; \vec k)$ est dirigé vers le haut.
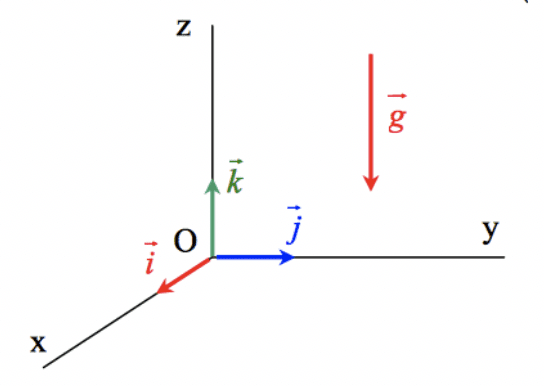
La relation vectorielle $\overrightarrow{a_{\rm G}} = \vec g$ permet d'écrire les coordonnées du vecteur accélération du centre d'inertie du solide puisqu'on connaît celles de $\vec g$.
\[\overrightarrow{a_{\rm G}}(t) = \left\{ \begin{array}{lll}
a_x(t) = 0\\
a_y(t) = 0\\
a_z(t) = -g\\
\end{array}\right.\]