Signal Logique Codé
Un signal logique codé est un signal logique dont le but est de faire passer une série de valeurs binaires, appelés bits, d’une source vers un destinataire.
Exemple : Lecture d’un signal logique codé
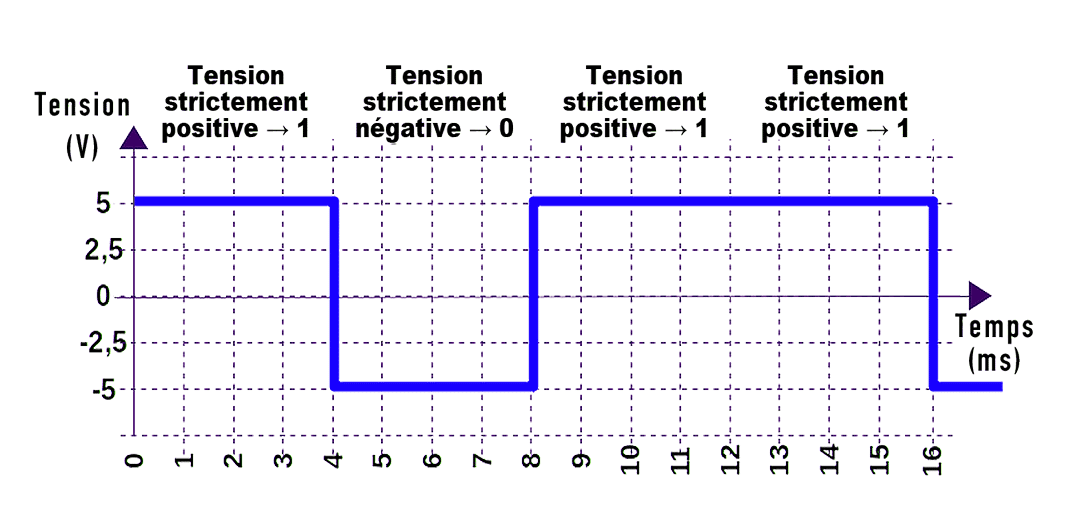
Ce signal permet de transmettre 4 bits, qui valent 1011. La durée de transmission d’un bit est 4ms.
Trame
Une trame est une succession de bits, qui sont transmis en suivant les règles d’un protocole de communication. Une trame est caractérisée par :
- une longueur, en nombre de bits ou octets ;
- une vitesse de transmission des données en bits/s ou octets/s ;
- une structure.
Structure d’une trame
La structure d’une trame comporte 3 parties :
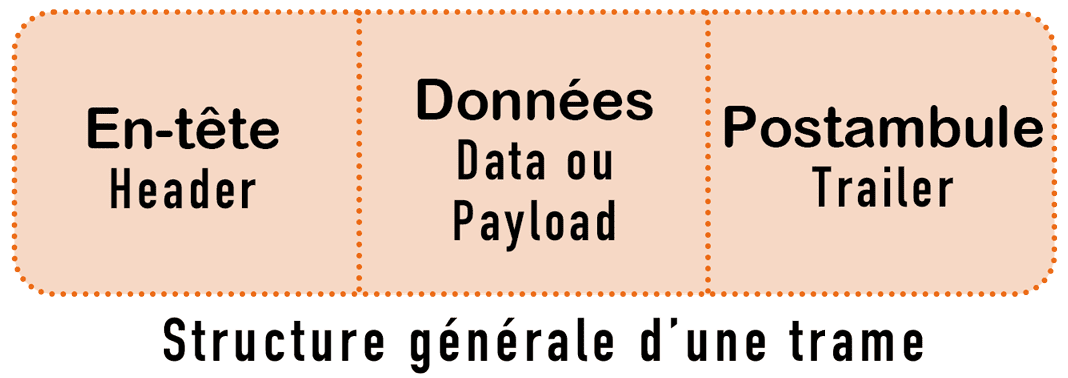
- un en-tête, qui comporte généralement une séquence de start pour indiquer que la trame commence ;
- des données, qui comportent généralement une série de bits. Ces bits forment une valeur numérique binaire, qui peut être reconstituée ;
- un postambule, qui comporte généralement :
- un bit de parité, pour détecter les erreurs de transmission ;
- une séquence de stop pour indiquer que la trame se termine.
Ordre de transmission des bits
Pour la partie données, les bits peuvent être envoyés :
- du MSB (most significant bit = bit de poid fort) au LSB (least significant bit = bit de poid faible) : dans ce cas les bits de données se lisent de la gauche vers la droite ;
- du LSB au MSB : dans ce cas les bits de données se lisent de la droite vers la gauche.
Exemple : Lecture d’une trame
Soit un protocole transmettant des trames de 11 bits, avec la structure suivante :
![]()
Voici une capture effectuée lors de la transmission d’une trame avec ce protocole :
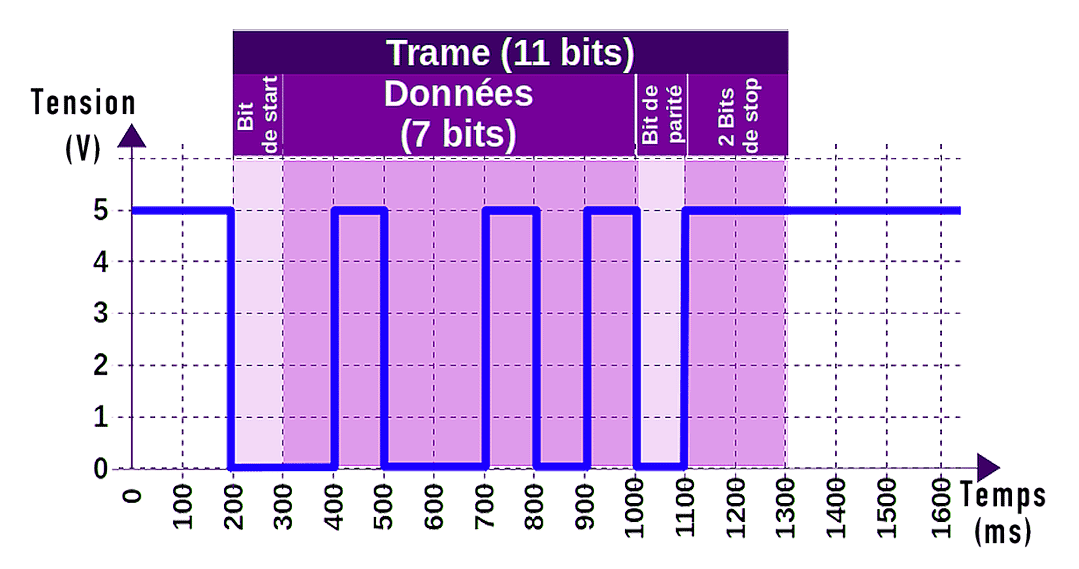
Comme les données sont transmises du LSB au MSB, on en déduit que les bits de données valent (1010010)2. En décimal, cela correspond à 64 + 16 + 2 = 82
Bus de Communication
Un bus de communication est un support de transmission partagé par plusieurs composants et/ou systèmes. Le bus de communication leur permet de s’échanger des trames, et de mettre les composants/systèmes en réseau. Les bus de communication peuvent être :
- filaires ;
- sans fil.
Voici quelques exemples de bus courants : I2C, SPI, CAN et USB.
La plupart des bus fonctionnent suivant le modèle maître-esclave :
- un composant est le maître : il contrôle entièrement la communication, c’est toujours lui qui initie et dirige les échanges.
- plusieurs composants sont les esclaves : ils attendent de recevoir des commandes du maître. Une fois ces commandes reçues, les esclaves peuvent exécuter des commandes transmises par le maître et/ou lui envoyer des trames.










