Le référentiel est un endroit de référence par rapport auquel on étudie le mouvement d’un mobile.
A chaque référentiel est associé :
- Un repère d’espace pour quantifier la position ;
- Un repère de temps (une horloge) pour associer une date à chaque position.
La position d'un mobile M dans un repère (O,→i,→j,→k) est donnée par son vecteur-position →OM :
→OM(t)(x(t)y(t)z(t))⇔→OM(t)=x(t)→i+y(t)→j+z(t)→k
L'ensemble des points occupés successivement par le mobile M au cours du temps est appelé trajectoire.
Le vecteur vitesse :
Le vecteur-vitesse →v(t) caractérise la variation du vecteur-position en fonction du temps. Il s'exprime donc comme la dérivée par rapport au temps de son vecteur position.
Le vecteur-vitesse instantanée au point Mi s'écrit donc :
→v(t)=d→OMdt{t en sOM en mv en m.s^{-1}
→v(t)=vx(t)→i+vy(t)→j+vz(t)→k=˙x→i+˙y→j+˙z→k
Notation :
- vx(t)=˙x=dxdt
- vy(t)=˙y=dydt
- vz(t)=˙z=dzdt
Les caractéristiques du vecteur-vitesse sont les suivantes :
→v(t){direction : tangent à la trajectoiresens : celui du mouvementvaleur (norme) : ‖→v‖=v=√v2x+v2y+v2z
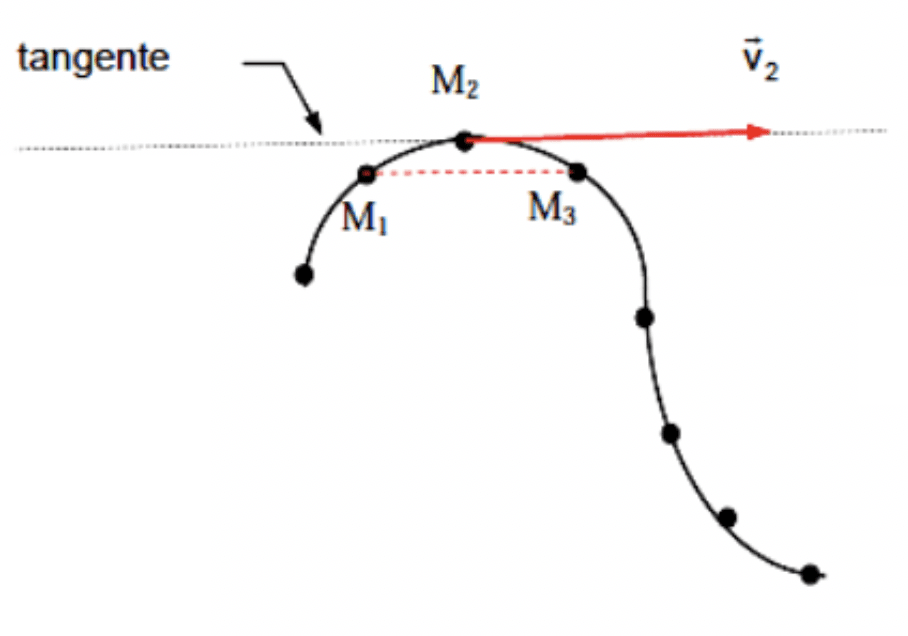
CONSTRUCTION D'UN VECTEUR VITESSE
Le vecteur vitesse moyen →v(t2) au point M2 à la date t2 s'écrit : →v(t2)=→M1M2T1−t2.
Le vecteur vitesse →v(t2) possède :
- Une direction : la tangente à la trajectoire au point M2, parallèle à la droite M1M3.
- Un sens : celui du mouvement.
- Une valeur : v2=M1M2t1−t2=M1M32τ=v2 s'exprime en m.s−1.
(τ : intervalle de temps constant entre deux points consécutifs). - Une longueur : donnée par une échelle des vitesses (exemple = 1 cm↔0,1 m.s−1).
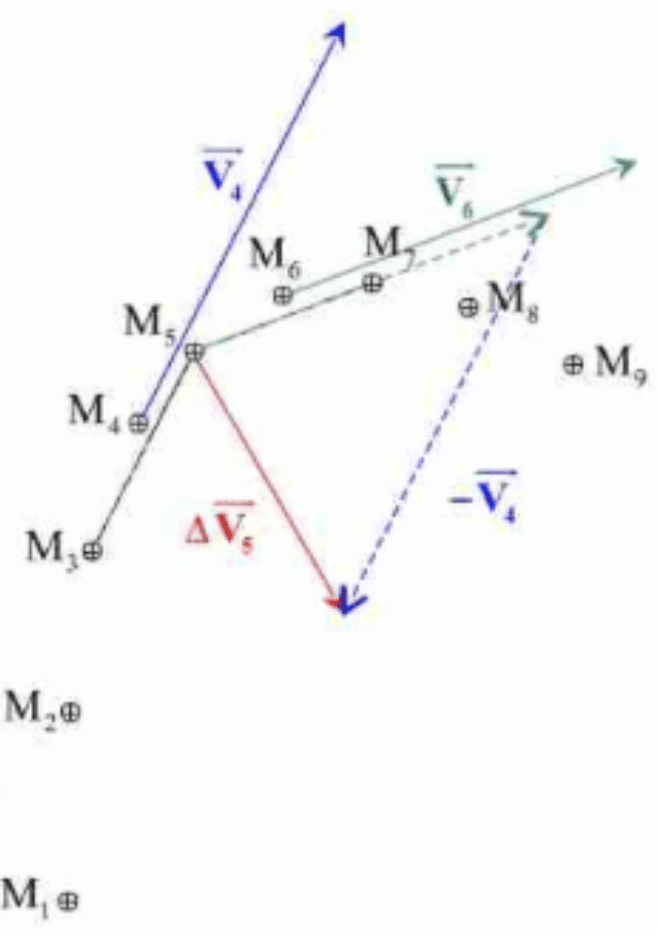
Le vecteur variation de vitesse :
Comment construire le vecteur →ΔV5=→V6−→V4 ?
- Tracer les vecteurs vitesses →V4 et →V6.
- Au point M5, reconstruire le vecteur →V6.
- Construire le vecteur −→V4 depuis l'extrémité du vecteur →V6 reconstruit juste avant.
- Le vecteur →ΔV5 est le vecteur qui joint l'origine de →V6, point M5, à l'extrémétité de −→V4.
La somme des forces appliquées au système :
∑→Fext=m×Δ→vΔt
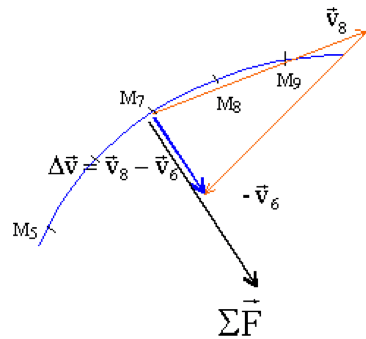
Le rôle de la masse du système :
Plus la masse du système est grande, plus la variation du vecteur vitesse est faible pour une même somme des forces appliquées.
Le vecteur-accélération →a(t) caractérise la variation du vecteur-vitesse en fonction du temps comme la dérivée par rapport au temps du vecteur-vitesse.
Le vecteur-accélération au point Mi s'écrit donc :
→a(t)=d→vdt=d2→OMdt2{t en sv en m.s−1a en m.s−2
→a(t)=ax(t)→i+ay(t)→j+az(t)→k =˙vx→i+˙vy→j+˙vz→k =¨x→i+¨y→j+¨z→k
Notation : ax(t)=dvxdt=d2xdt2=¨x
De même pour ay et az.
Les caractéristiques du vecteur-accélération sont les suivantes :
→a(t){direction : celle du vecteur →Δv(t)sens : celui du vecteur →Δv(t)valeur (norme) : a=ΔvΔt=‖→a‖=√a2x+a2y+a2z

